Adaptive Mobility, Infrastructure and Land Use: Conference 2023
The Adaptive Mobility, Infrastructure and Land-use module [AMIL], started in January 2023, envisions to improve infrastructure planning processes to better and faster meet the needs of stakeholders (e.g., carbon neutrality, 45-Minute City by 2050).
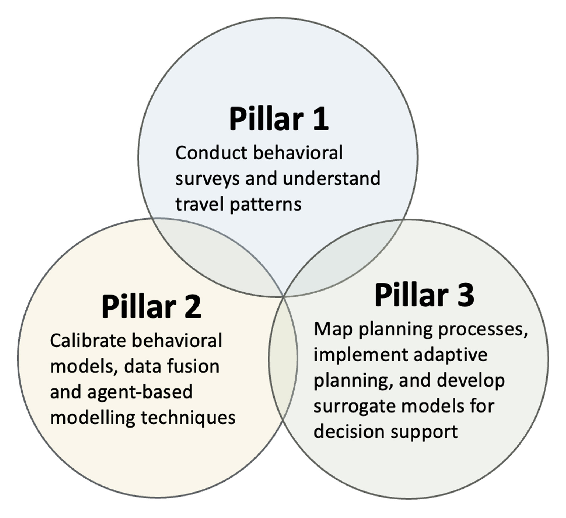
AMIL's vision is supported by three pillars: (1) an improved understanding of how mobility needs may change, (2) how new models of mobility, land use and infrastructure can be used, and (3) how planning processes can be made more adaptive and robust to future uncertainties.
We will develop practice-ready decision support tools and methods, which include nnovative surveys and behavioural models, data fusion approaches to leverage multiple data sources, agentbased MATSim models, surrogate transport models for adaptive planning, advancements in appraisal framework, and reinforcement learning methods for spatio-temporal allocation of infrastructure. While these approaches will be applied to Singapore and Switzerland with the engagement of local planning agencies, they are intended to be transferrable to other case studies.
Pillar 1: How are mobility needs changing?
Focus on conducting online and street intercept surveys to understand individual mobility patterns and preferences in the post-pandemic aera. This pillar also aims to elicit the social network effects of activity planning in Singapore. Two pilot studies have been successfully conducted, with a larger-scale survey planned.
Pillar 2: Model-based analysis for integrate land-use and transport applications
Focus on improving integrated models for analysing land-use and transport challenges. This includes development of high-resolution agent-based models to simulate individual mobility patterns. Model inputs and calibration of model parameters will be developed using novel data engineering methods based on household travel surveys and passively-collected mobility data.
Pillar 3: How can planning processes be more adaptive and robust to future uncertainties?
Focus on increasing model usability and improving planning processes. This includes developing coupled complex and surrogate models that overcome the computational complexity and expense of full-scale agent-based models. This pillar further focuses on mapping planning processes and identifying avenues for incorporation of adaptive planning principles in local planning processes.
What is Adaptive Planning?
The adaptive planning approach is rooted in a philosophy that acknowledges the inherent variabilities and uncertainty in the environment. Some guiding principles for the approach found in literature include iterative learning, flexibility, and responsiveness to changing conditions. As opposed to prescribing a one-size-fits-all series of steps that is to be followed and applied at any context, planners instead develop multiple potential policy sequences (“pathways”) based on multiple potential scenarios. The selected pathway may be adapted and applied when more knowledge is uncovered and uncertainties are reduced as time goes by.
The approach explicitly considers the timing and sequencing of strategies to maintain flexibility while keeping risk below acceptable levels, and includes an active monitoring and learning system for timely detection of relevant changes in the system and trigger policy changes. Beyond assisting planners with developing robust and flexible plans, an adaptive planning approach can increase awareness about uncertainties, particularly amongst relevant stakeholders and decision-makers.
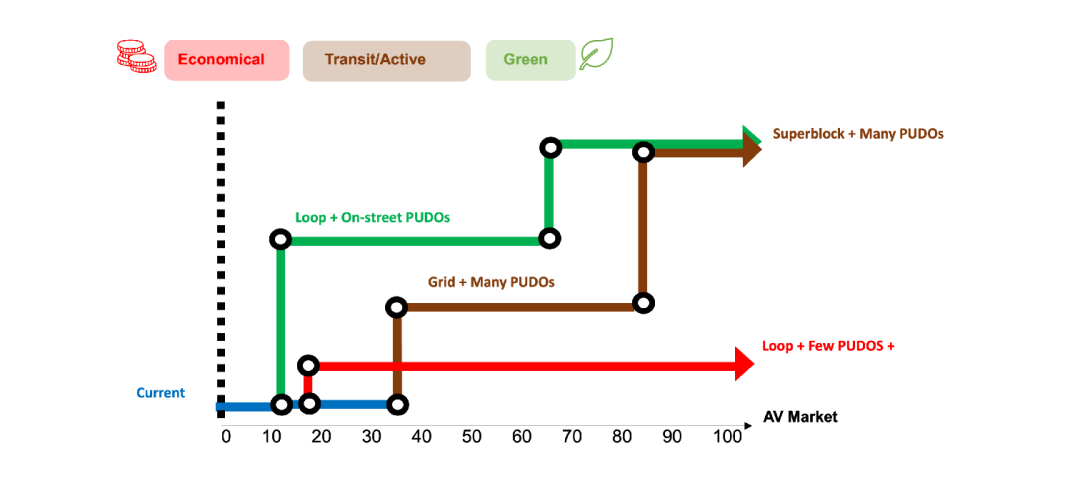
Adaptive pathways of potential transitions for the technological shift. The x-axis represent the Automated Vehicles (AVs) market share over time. The circles represent decision points, triggered at certain AVs market share, in which certain intervention options are implemented. Three competing adaptive pathways are shown. The red “economic” pathway is the one that minimizes investment and therefore proposes smaller changes in the neighbourhood. The yellow “transit/active” pathway maximizes public transit use and active mobility. The “green” pathway minimizes carbon emissions.
Adaptive Planning Proof-of-Concept Study Future Tanjon Pagar Neighbourhood
Objectives
Evaluate the feasibility of developing a fast surrogate model from a detailed MATSim in order to allow a wide exploration of future scenarios.
Exemplify the potential of using model-based planning support tools to identify adaptive pathways on the interaction between mobility, infrastructure and land use.
Test the scalability of the modelling framework under varied conditions and uncertainty inputs.
The case study location is the Tanjong Pagar area of Singapore. It is the base case used for testing urban design responses to the technological shift in transportation, in accordance with the layout of the L2NIC project.
Experimented Network structures (Loops, Grid, and Superblock)
Step 1
Evaluate the impacts of potential urban intervention options (e.g., transportation network configurations, infrastructure for shared automated vehicles and various parking strategies) under three main uncertainties over time: travel demand, automation development and vehicle sharing preferences.
Step 2
Calibrate a fast surrogate model, allowing the simulation of thousands of future scenarios and the search for optimal sequencing, timing, and grouping of interventions (i.e., adaptive pathways) to achieve multiple desirable outcomes (e.g., reduction of carbon emissions, increased use of public transport and increased active mobility).
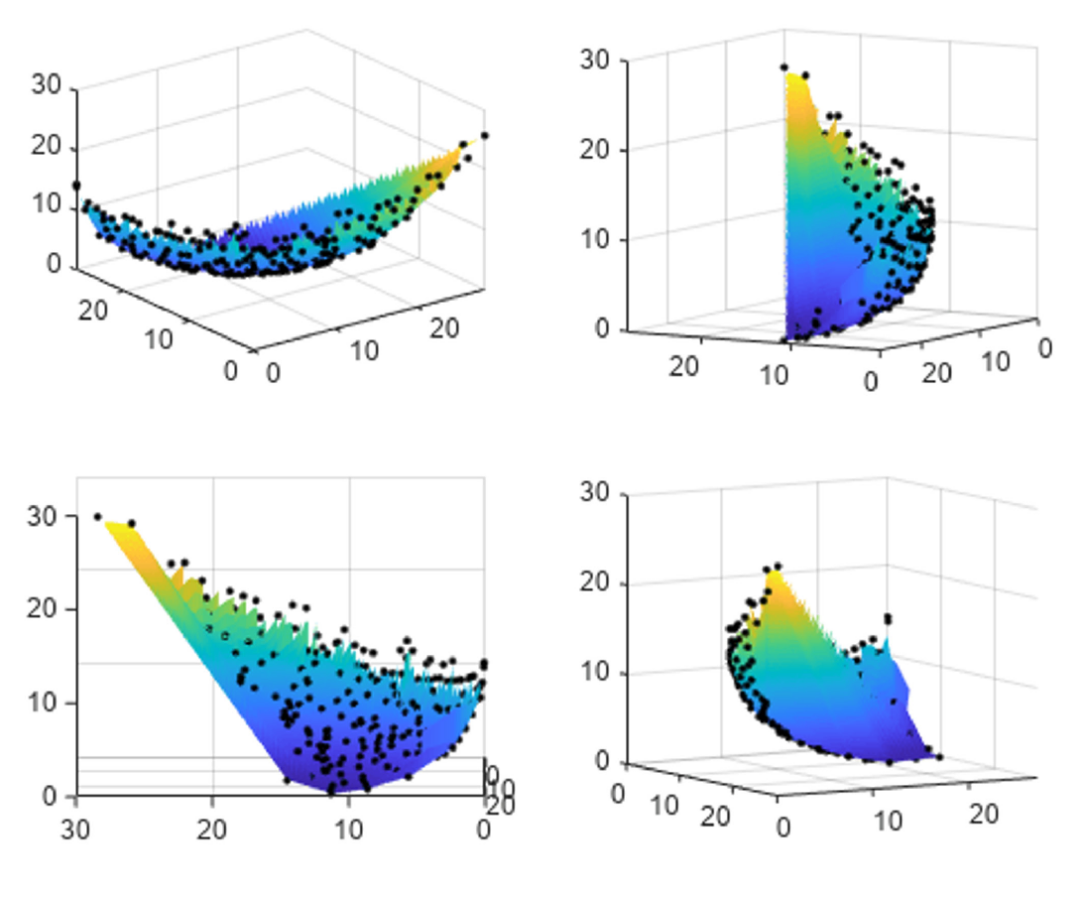
This project demonstrated that surrogate models, with acceptable precision, can be developed from complex agent-based models increasing the ability to analyse uncertainty. The identification of competing adaptive pathways allows the evaluation of trade-offs and the identification of the likely or optimal times that different interventions will be needed.
An example of a 3D Pareto front from a multi-objective optimization with 3 objectives. Each Axis represent the values of each objective. The black dots are the optimal (nondominated) solutions found, which include both extreme solutions and compromise solutions (the ones that optimize all objectives to some degree). The plot is rotated for a better visualization of the structure of the Pareto front.
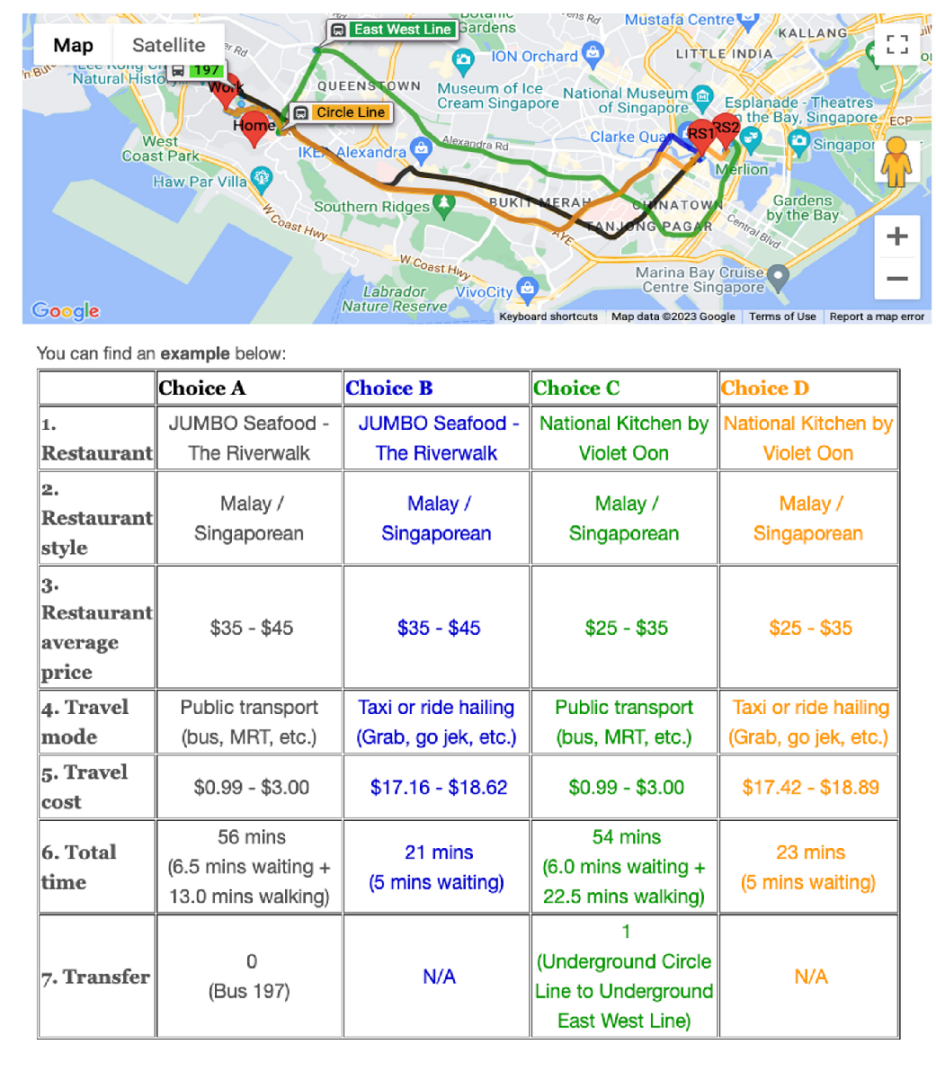
How to Capture the Daily Travel Behaviours of Households?
Household travel surveys are one of the most commonly used and effective ways of capturing the travel patterns of a population. We have launched two separate surveys in Singapore:
MATSim Simulation Visualization
Work-from-home patterns
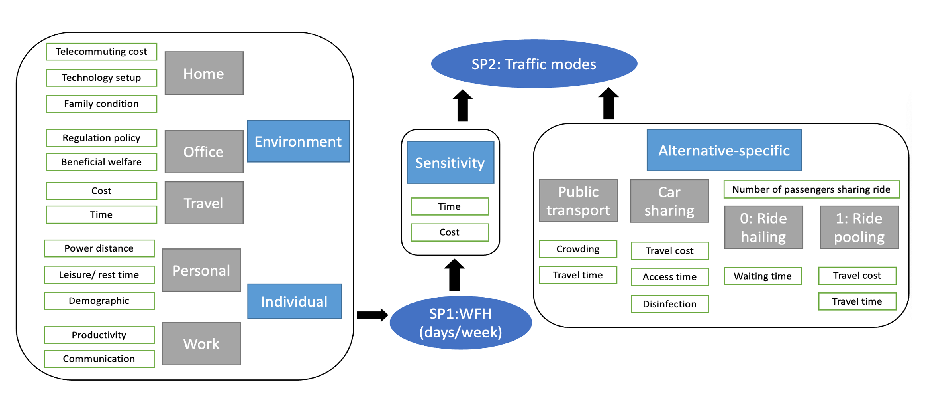
This project is aimed at understanding the factors affecting preferences for work-from-home (WfH) and how telecommuting affects commute mode preferences. Using two stated preference surveys, this study evaluates how significantly WfH practices have altered individual perceptions of the value of travel time and travel cost.
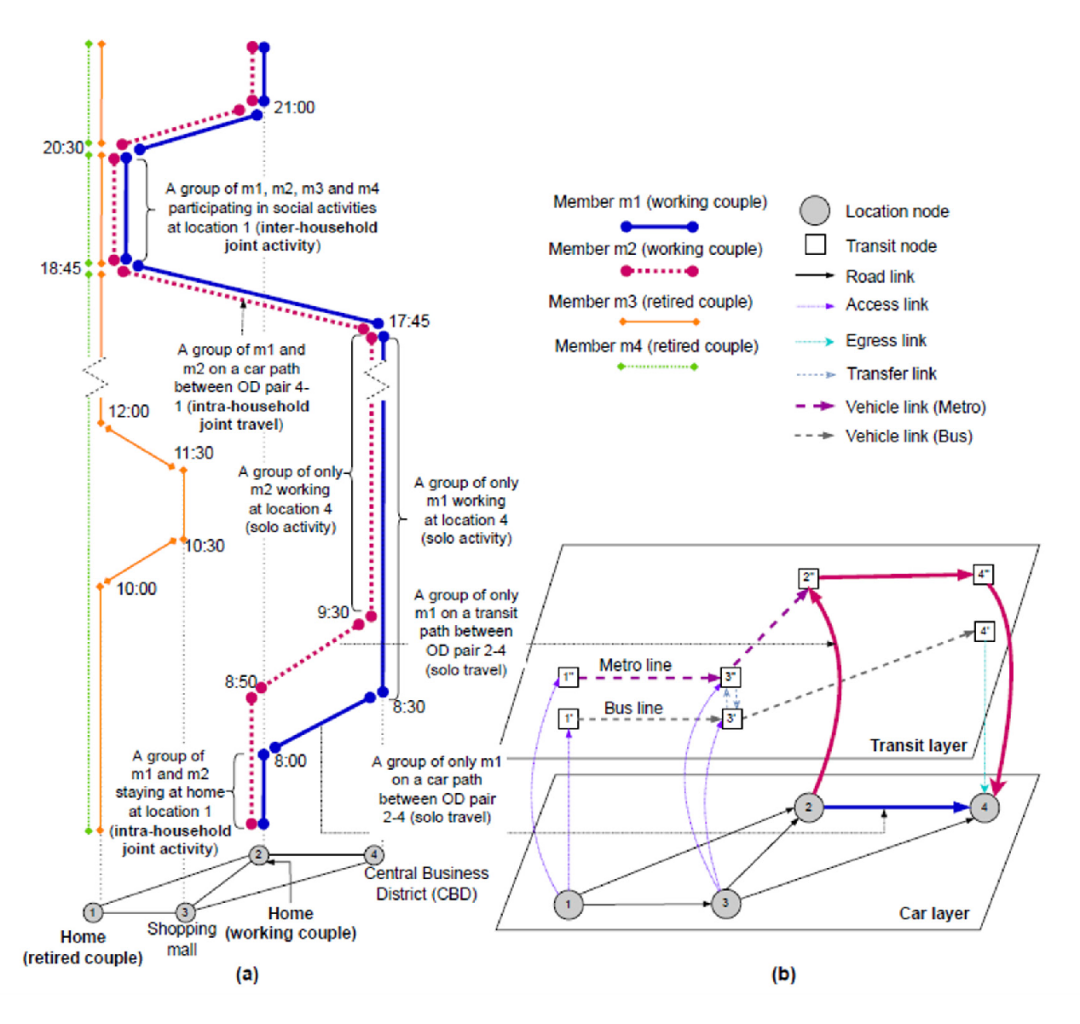
Inter-household social activities
This project surveys the effect of social networks on the individual’s decision-making process for leisure activities. A pair-level street-intercept survey was collected in Singapore to understand how people negotiate travel modes and activity locations while jointly planning leisure activities.
Mobility Behaviour and Microsimulation
Objectives
Understanding daily travel patterns and social network activity patterns of households
Incorporating social network effects in activity-based model for improved destination choice modelling of secondary activities
Account for telecommuting effects and its impact on travel mode preferences
Leverage passively-collected mobility (PC) data to create synthetic population and initial activity plans of synthetic agents.
Research under Pillar 1 and 2 focuses on surveying travel behaviours and calibrating models for predicting future travel patterns.
The first part uses household surveys to understand the factors affecting preferences for work-from-home (WfH) and how telecommuting affects commute mode preferences. Using two stated preference surveys, this study evaluates how significantly WfH practices have altered individual perceptions of the value of travel time and travel cost. The resulting behavioural models will be integrated into MATSim to account for notable and enduring shifts in telecommuting and travel mode preferences of Singaporeans.
The second part develops a framework to understand the effect of social networks on the individual’s decision-making process for leisure activities. A pair-level street-intercept survey was collected in Singapore to understand how people negotiate travel modes and activity locations while jointly planning leisure activities. Integrating behavioural models developed using this data into the agent-based model will deepen the understanding of the relationship between inter-household social networks and transportation decisions.
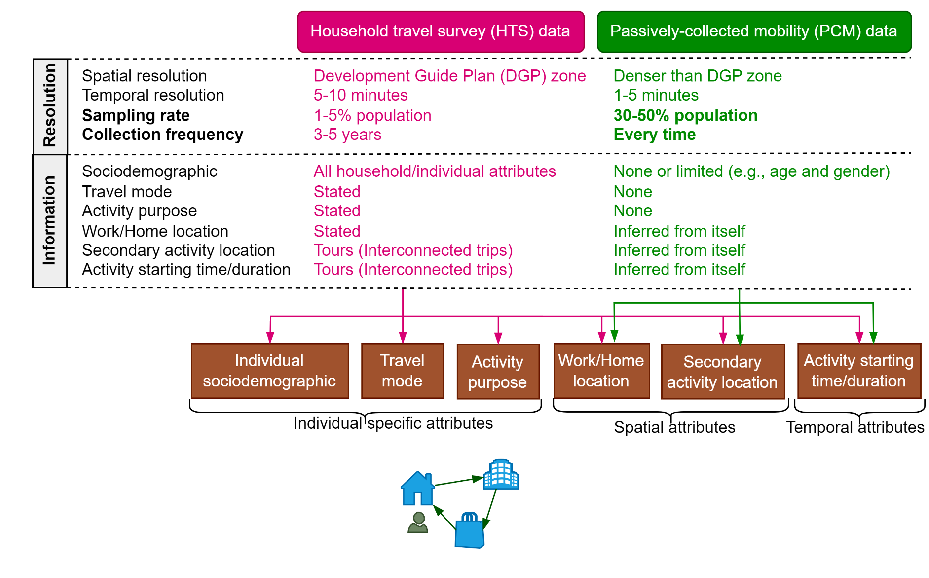
Agent-based microsimulation models require high-resolution data inputs which are often difficult to obtain. This need can be met using a synthetic population, which can be generated using alternative sources of data such as demographic statistics and household travel surveys (HTS). However, generating synthetic populations and their home-work locations is challenging using HTS due to its low spatial resolution and low sampling rate.
We address this challenge by developing a novel cluster-based data fusion method that jointly makes use of HTS data and passively collected cellular signalling data to generate highly spatially heterogeneous mobility patterns for a large proportion of the population. This proposed data fusion technique will be applied to generate synthetic population for MATSim Singapore.
Three experiments are conducted to validate method accuracy, investigate properties of the synthetic outputs, and demonstrate the case study of the proposed method using HTS and cellular signalling data from Seoul, South Korea. This proposed data fusion technique will be applied to generate a synthetic population of Singapore that can be used as model inputs or for model calibration.
We’re currently fine-tuning the MATSim model for testing within a broader spatial and temporal scope in Singapore, i.e. comprehending citizens’ mobility across pre-, during, and post-Covid eras. On the other hand, developing a surrogate model and other optimization models forms the primary focus of our work. Coupled with full-resolution MATSim models, these surrogate models are expected to represent underlying correlations between travel behaviour, infrastructure development, and land use, amidst various uncertainties. We expect such a coupled system to refine and enable improved analysis and navigation of interventions in both spatial and temporal dimensions.
1. Illustration of apiece of raw results for the social networking activities survey. 2. A schematic demonstrating incorporating the social network effects in activity-based model. 3. This flow chart demonstrate the concrete features to be considered for the analysis of the work-from-home scheme. Two stated preference experiments were conducted. 4. This figure demonstrate the process of data fusion between the conventional HTS data and the PCM data, including how specific features could be synergised.
Adaptive Planning of Fast Charging Infrastructure
Objectives
Understanding daily travel patterns and social network activities.
Model the interaction between demand for electric vehicles
Changes in mobility patterns
Implementation of fast charging infrastructure over time
Emphasis on consideration of spatial constraints and uncertainties.
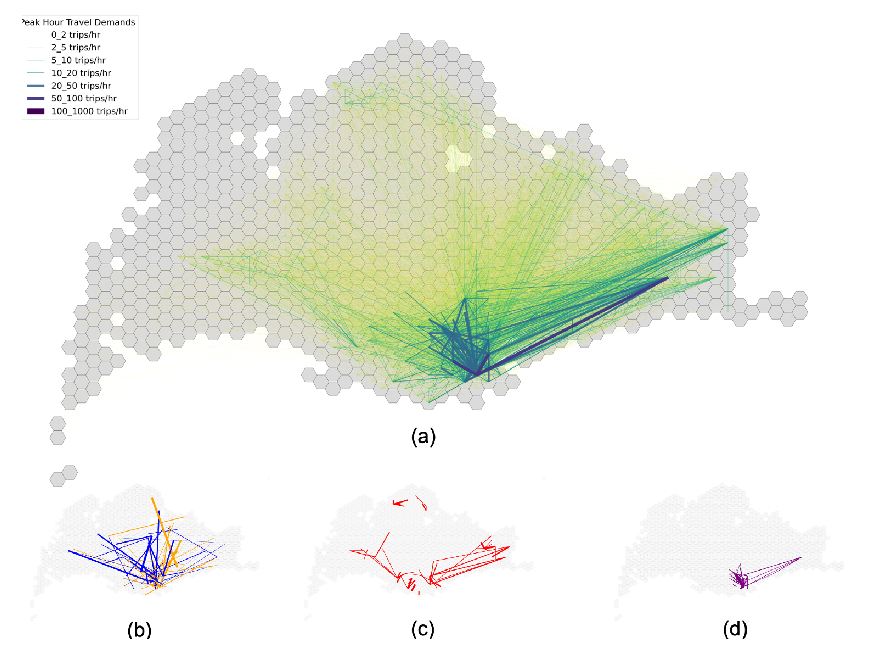
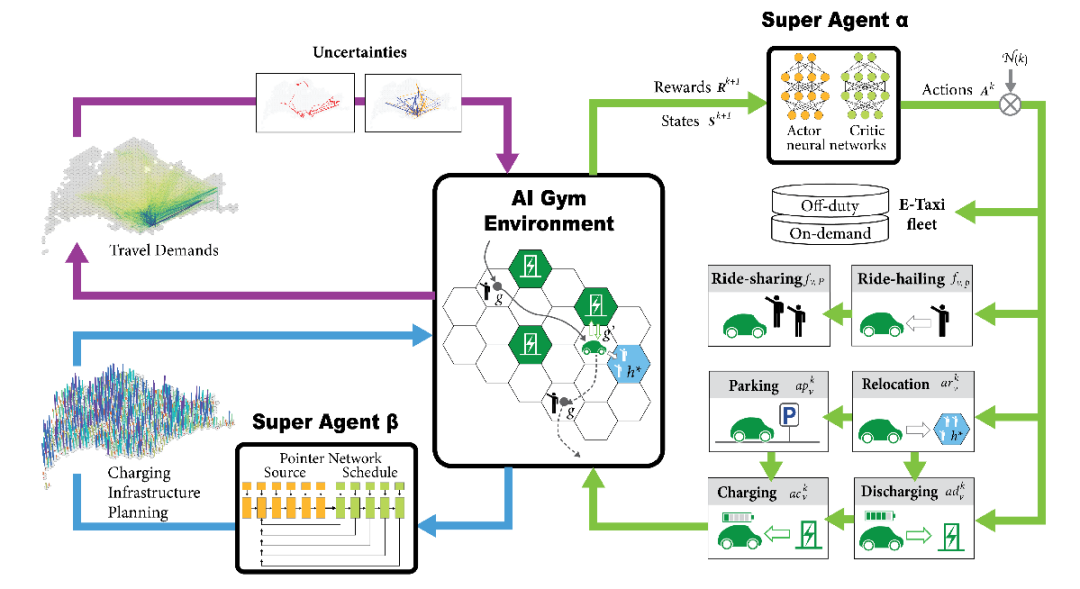
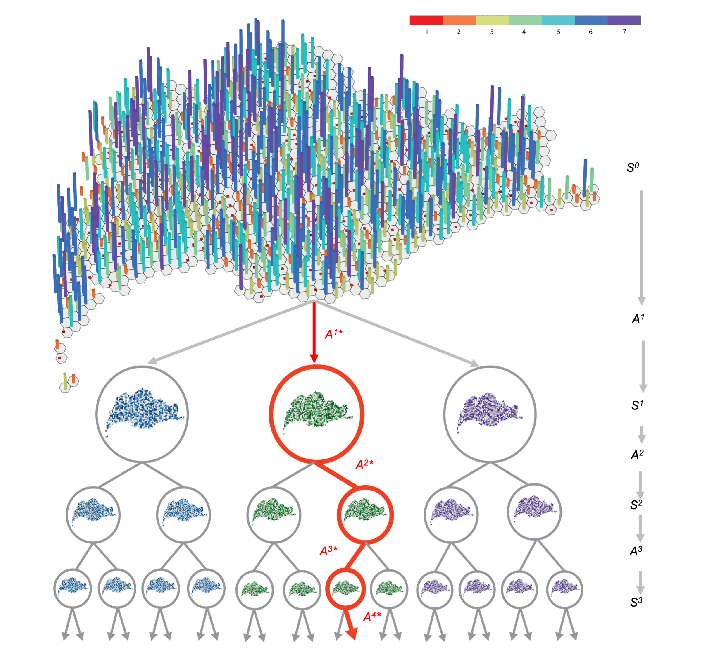
1. Future travel demands are uncertain. The upper figure demonstrate the status-quo taxi trips of Singapore, while the lower figures shows three possible developments of travel demands. 2. A reinforcement learning-based dual optimisation model to determine the optimal location and capacity of charging points at different stages of employment, interplaying between discrete decisions and complex E-Taxi operations. 3. The location and capacity of charging points (S0), and solving the subsequential decision chains with the optimal decision (Ak* circled in red circle), in sequence.
Singapore plans to deploy 60,000 EV charging points by 2023. To efficiently plan the charging infrastructure, it is necessary to address the optimal location and capacity of both AC and DC chargers at each deployment stage.
In this project, we aim to develop a tool for determining the best way to sequence installation of charging stations. The tool represents an approach that uses real-world travel data, charging infrastructure data, and AI to optimize the deployment process of charging facilities. Concretely, the characteristics of charging infrastructure include the quantity, size, and location at each deployment step (i.e. per month). This problem is a complex and non-deterministic optimisation problem.
A Markov Decision Process is used to determine the optimal location and deployment stage, under unknown travel patterns and the system stochasticity. For E-taxis, providing an initial city-wide charging point configuration (S0), at each week or month policymakers need to decide where and how many new chargers to be installed to meet the charging demands.
Spatial constraints include considerations of which land use types are fit for deployment. We further consider travel demands,and the corresponding charging demands to be uncertain in the future course of development.
Uncertain factors include:
Population growth
Market share of shared mobility
Land-use development
Advancements in battery technologies
Accessibility of charging locations
Peak hour taxi trips
Differences in travel demands
Increase in trips in peripheral city centres due to the decentralisation strategy (years from now)
Increase in trips in downtown regions resulting from the strong city centre policy (years from now)
Surrogate model:
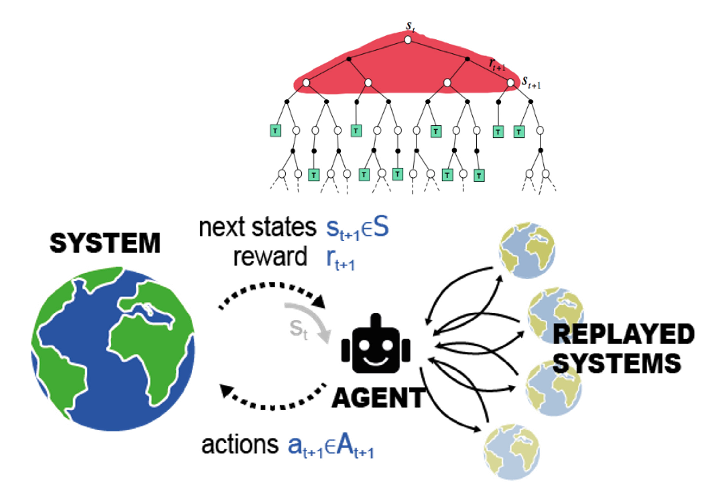
To solve this complex spatio-temporal decision problem, we have developed a reinforcement learning-based dual optimization model to approximate step-wise optimal deployment plans as solutions to adaptive planning pathways. The proposed reinforcement learning model has two super agents that interact with the system in an AI gym environment, wherein they evolve their respective decision neural networks (i.e., microscopic traffic dynamics, infrastructure placement).
What is a Surrogate Model?
A surrogate model is a simplified representation of a complex or computationally expensive model, created to approximate its behavior while significantly reducing the computational cost or time needed for evaluation. These models are often used in scenarios where the original model is resource-intensive, such as simulations or data analysis. Surrogate models can be data-driven, using techniques like machine learning, and are useful for tasks like optimization or making predictions within or even beyond the range of training data. While they enhance efficiency, it’s important to acknowledge that they may introduce some level of error or uncertainty compared to the original model.
Real-world stochastic sequential decision problems are defined by unknown system dynamics, random state transitions, and incomplete information when making decisions. These problems are challenging to solve using conventional Convex Optimal Control Policy (COCP) methods. Reinforcement Learning (RL) methods offer viable solutions for that. Using trial-and-error to approximate near-optimal solutions, RL methods overcome the curse of dimensionality challenge, and they can be model-free without solving the cost functions, and execute off-policy learning in sample inefficient situations.
For instance, the reinforcement learning model (upper figure) in this case represents a surrogate model used to explore possible future scenarios (lower figure) and approximate optimal decision sequences without combing through the entire solution space.
Infrastructures and Ecologies / [AMIL] Adaptive Mobility, Infrastructure and Land Use Principal Investigators: Prof. Dr. Bryan Adey, Assoc. Prof. Dr Pratheek Bansal Co- Investigators: Dr Kay Axhausen, Dr. Tanvi Maheshwari, Dr. Pieter Fourie Researchers: Dr. Qiming Ye, Dr. Canh Xuan Do, Jin Rui Yap, Miran Lu, Zhuhan Jin Module Coordinator: Dr. Qiming Ye